The Hessian#
In one variable, the second derivative of a function is a number that tells us about the curvature of the function. But in many variables, each partial derivative can change in many directions—so we need a matrix of second derivatives:
The Hessian matrix of a scalar-valued function \( f : \mathbb{R}^d \to \mathbb{R} \) is a square matrix of second-order partial derivatives:
Theorem (Clairaut Schwarz)
Let \(f: \mathbb{R}^d \to \mathbb{R}\) be a function such that both mixed partial derivatives \(\frac{\partial^2 f}{\partial x_i \partial x_j}\) and \(\frac{\partial^2 f}{\partial x_j \partial x_i}\) exist and are continuous on an open set containing a point \(\mathbf{x}_0\)
Then:
That is, the order of differentiation can be interchanged.
Clairut’s Theorem implies that the Hessian matrix is symmetric. We provide a proof sketch in the appendix.
Curvature in One Dimension#
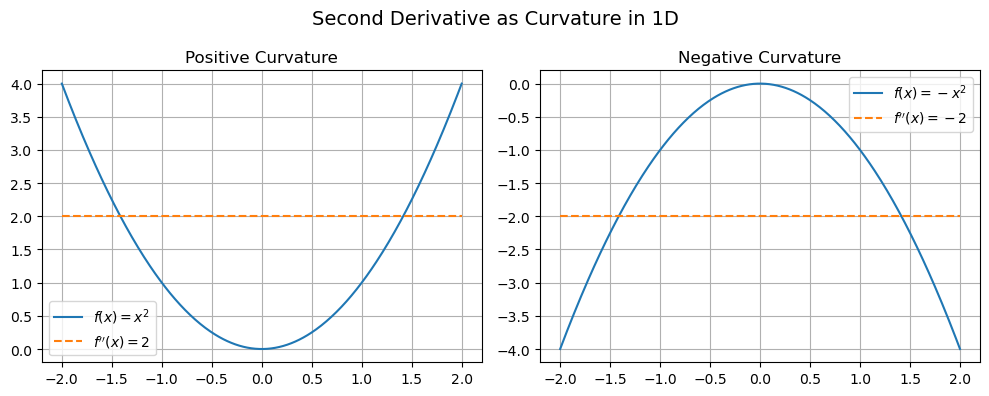
Recall the second derivative in one dimension:
\(f(x) = x^2\): curve is “smiling” ⇒ second derivative is positive ⇒ function is curving upward.
\(f(x) = -x^2\): curve is “frowning” ⇒ second derivative is negative ⇒ function is curving downward.
Point: second derivative tells us how the function curves.
Show code cell source
import numpy as np
import matplotlib.pyplot as plt
x = np.linspace(-2, 2, 400)
f1 = x**2
f2 = -x**2
f1_dd = np.full_like(x, 2) # Second derivative of x^2
f2_dd = np.full_like(x, -2) # Second derivative of -x^2
fig, axes = plt.subplots(1, 2, figsize=(10, 4))
# Plot for f(x) = x^2
axes[0].plot(x, f1, label='$f(x) = x^2$')
axes[0].plot(x, f1_dd, '--', label='$f\'\'(x) = 2$')
axes[0].set_title('Positive Curvature')
axes[0].legend()
axes[0].grid(True)
# Plot for f(x) = -x^2
axes[1].plot(x, f2, label='$f(x) = -x^2$')
axes[1].plot(x, f2_dd, '--', label='$f\'\'(x) = -2$')
axes[1].set_title('Negative Curvature')
axes[1].legend()
axes[1].grid(True)
plt.suptitle("Second Derivative as Curvature in 1D", fontsize=14)
plt.tight_layout()
plt.show()
The Hessian generalizes this intuition to multiple Dimensions.
Curvature in Two Dimensions#
Now, let’s look at a simple 2D surface like:
\(f(x, y) = x^2 + y^2\): bowl shape
\(f(x, y) = x^2 - y^2\): saddle shape
Show code cell source
from mpl_toolkits.mplot3d import Axes3D
from matplotlib import cm
x = np.linspace(-2, 2, 100)
y = np.linspace(-2, 2, 100)
X, Y = np.meshgrid(x, y)
# Bowl: f(x, y) = x^2 + y^2
Z_bowl = X**2 + Y**2
# Saddle: f(x, y) = x^2 - y^2
Z_saddle = X**2 - Y**2
fig = plt.figure(figsize=(12, 5))
# Bowl surface
ax1 = fig.add_subplot(1, 2, 1, projection='3d')
ax1.plot_surface(X, Y, Z_bowl, cmap=cm.viridis, alpha=0.9)
ax1.set_title("Bowl: $f(x, y) = x^2 + y^2$")
ax1.set_xlabel("x")
ax1.set_ylabel("y")
ax1.set_zlabel("f(x, y)")
# Add annotations for curvature
ax1.text(0, 0, 0, '∂²f/∂x² = 2\n∂²f/∂y² = 2', fontsize=10)
# Saddle surface
ax2 = fig.add_subplot(1, 2, 2, projection='3d')
ax2.plot_surface(X, Y, Z_saddle, cmap=cm.coolwarm, alpha=0.9)
ax2.set_title("Saddle: $f(x, y) = x^2 - y^2$")
ax2.set_xlabel("x")
ax2.set_ylabel("y")
ax2.set_zlabel("f(x, y)")
ax2.text(0, 0, 0, '∂²f/∂x² = 2\n∂²f/∂y² = -2', fontsize=10)
plt.suptitle("Curvature in 2D: Bowl vs Saddle", fontsize=14)
plt.tight_layout()
plt.show()
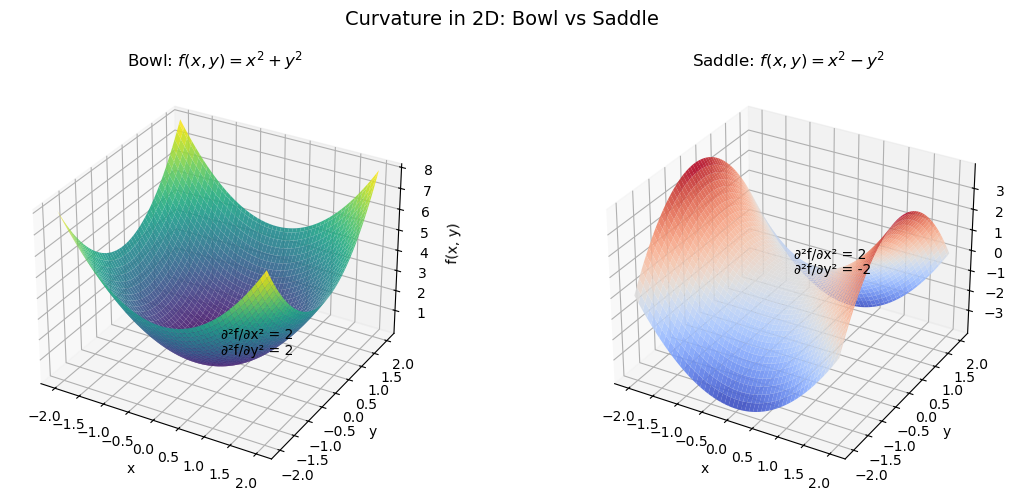
At each point, the function curves more or less in certain directions. The Hessian is a matrix that captures all this curvature information—it tells us how the slope (the gradient) changes in every direction.
A Simple Example#
\(\frac{\partial f}{\partial x} = 6x + 2y\)
\(\frac{\partial f}{\partial y} = 2x + 2y\)
Hessian:
\[\begin{split} \nabla^2 f = \begin{bmatrix} 6 & 2 \\ 2 & 2 \end{bmatrix} \end{split}\]
Each entry corresponds to a second derivative—either in the x-direction, y-direction, or mixed for the off-diagonals.
Gradient Vector Fields#
The Hessian matrix describes how the gradient vector changes as you move through space. Let’s visualize this in a grid with arrows pointing in the direction of the gradient — i.e., where the function increases most steeply.
Show code cell source
x = np.linspace(-3, 3, 30)
y = np.linspace(-3, 3, 30)
X, Y = np.meshgrid(x, y)
# Gradients
U_bowl = 2 * X
V_bowl = 2 * Y
U_saddle = 2 * X
V_saddle = -2 * Y
fig, axes = plt.subplots(1, 2, figsize=(12, 5))
# Bowl gradient field
axes[0].quiver(X, Y, U_bowl, V_bowl, color='green')
axes[0].set_title('Gradient Field: $f(x, y) = x^2 + y^2$')
axes[0].set_xlabel('x')
axes[0].set_ylabel('y')
axes[0].axis('equal')
axes[0].grid(True)
axes[0].set_ylim([-2.3,2.3])
axes[0].set_xlim([-2.3,2.3])
# Saddle gradient field
axes[1].quiver(X, Y, U_saddle, V_saddle, color='blue')
axes[1].set_title('Gradient Field: $f(x, y) = x^2 - y^2$')
axes[1].set_xlabel('x')
axes[1].set_ylabel('y')
axes[1].axis('equal')
axes[1].grid(True)
axes[1].set_ylim([-2.3,2.3])
axes[1].set_xlim([-2.3,2.3])
plt.suptitle("Gradient Vector Fields Show How ∇f Changes", fontsize=14)
plt.tight_layout()
plt.show()
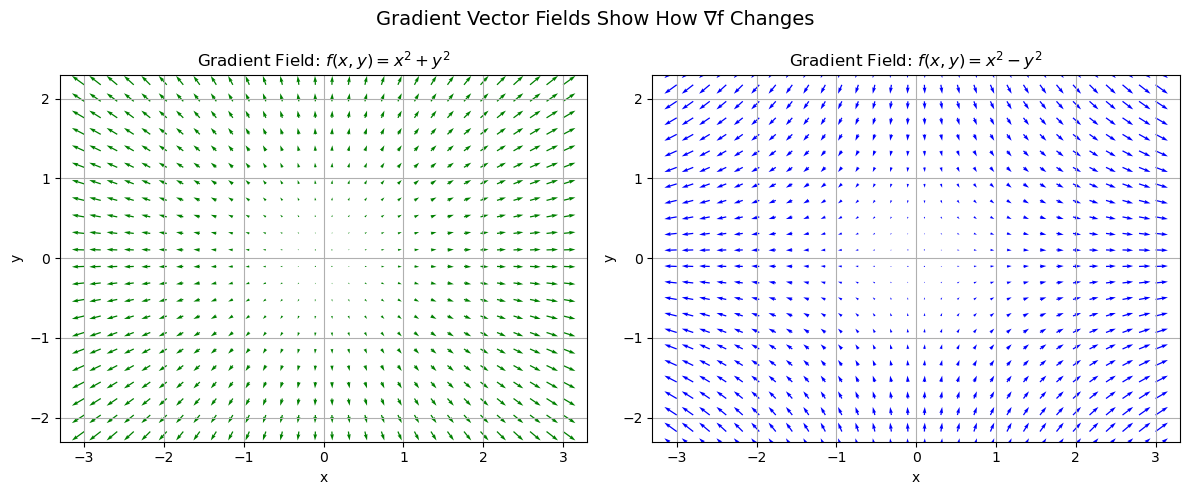
The gradient vector field shows how gradients vary over space.
The Hessian is the rate of change of the gradient—it tells you how steep the slope is getting in every direction.
The direction and length of arrows = the gradient vector at each point.
The rate of change of those arrows = what the Hessian captures.
🔍 How This Works in the Two Examples#
🟢 Bowl: \(f(x, y) = x^2 + y^2\)#
Gradient: \(\nabla f(x, y) = [2x,\ 2y]\)
Hessian:
\[\begin{split} \nabla^2 f = \begin{bmatrix} 2 & 0 \\ 0 & 2 \end{bmatrix} \end{split}\]
This means:
In the x-direction, the gradient increases by 2 units per unit of x.
In the y-direction, the gradient increases by 2 units per unit of y.
The gradient field shows arrows pointing radially outward—getting longer linearly with distance from the origin.
This linear increase in slope is exactly what the constant entries (2) in the Hessian mean.
🔵 Saddle: \(f(x, y) = x^2 - y^2\)#
Gradient: \(\nabla f(x, y) = [2x,\ -2y]\)
Hessian:
\[\begin{split} \nabla^2 f = \begin{bmatrix} 2 & 0 \\ 0 & -2 \end{bmatrix} \end{split}\]
This means:
In the x-direction, the gradient increases at the same rate as before: 2 per unit of x.
In the y-direction, the gradient decreases (negative rate): -2 per unit of y.
The gradient field shows outward arrows in the x-direction, but inward arrows in the y-direction.
That flip in sign in the Hessian entry \(\partial^2 f/\partial y^2 = -2\) explains why the gradient pulls you toward the origin in y.
🧩 Optional Extension: The Hessian as Jacobian of the Gradient#
We can think of the Hessian as the Jacobian of the gradient — it’s the matrix of all partial derivatives of the components of the gradient vector field.
That is:
Gradient Descent and the Hessian: Why Off-Diagonal Terms Matter#
🧠 Key Idea#
Gradient descent minimizes functions by moving in the direction opposite the gradient.
For quadratic functions:
Here, \(A\) is the Hessian matrix, and it determines the shape of level sets and how gradient descent behaves.
If \(A\) is diagonal → level sets are axis-aligned ellipses (or circles).
If \(A\) has off-diagonal elements → ellipses are rotated, and gradient descent struggles (zig-zags).
Show code cell source
import numpy as np
import matplotlib.pyplot as plt
def gradient_descent(A, x0, lr=0.1, steps=30):
traj = [x0]
x = x0
for _ in range(steps):
grad = A @ x
x = x - lr * grad
traj.append(x)
return np.array(traj)
def plot_descent(A, title, lr=0.1):
x = np.linspace(-100, 100, 100)
y = np.linspace(-100, 100, 100)
X, Y = np.meshgrid(x, y)
Z = 0.5 * (A[0,0]*X**2 + 2*A[0,1]*X*Y + A[1,1]*Y**2)
fig, ax = plt.subplots(figsize=(6, 6))
ax.contour(X, Y, Z, levels=40, cmap='viridis')
x0 = np.array([80, 90])
traj = gradient_descent(A, x0, lr=lr, steps=30)
ax.plot(traj[:,0], traj[:,1], 'ro--', label='GD Path')
ax.set_title(title)
ax.set_xlabel('x')
ax.set_ylabel('y')
ax.set_aspect('equal')
ax.grid(True)
ax.legend()
plt.show()
Case 1: Spherical Hessian (Identity Matrix)#
A_sphere = np.array([[1, 0], [0, 1]])
plot_descent(A_sphere, "Spherical Hessian: $A = I$")
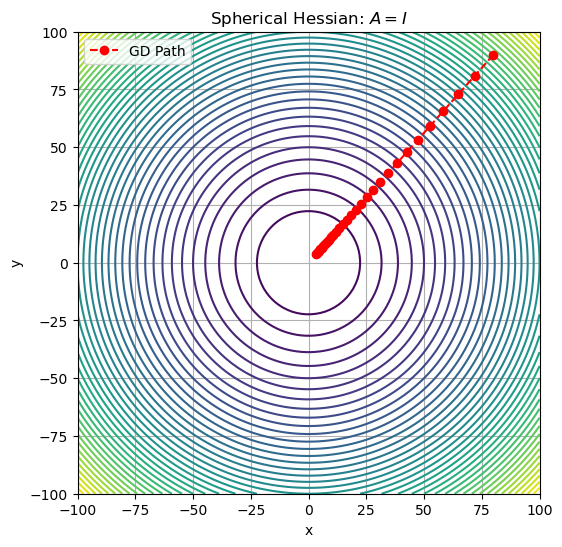
Level sets are circles.
Gradient descent takes straight, efficient steps toward the minimum.
Case 2: Anisotropic Hessian (Different Curvatures)#
Show code cell source
A_aniso = np.array([[15, 0], [0, 1]])
plot_descent(A_aniso, "Anisotropic Hessian: $A = \\mathrm{diag}(10, 1)$", lr=0.1)
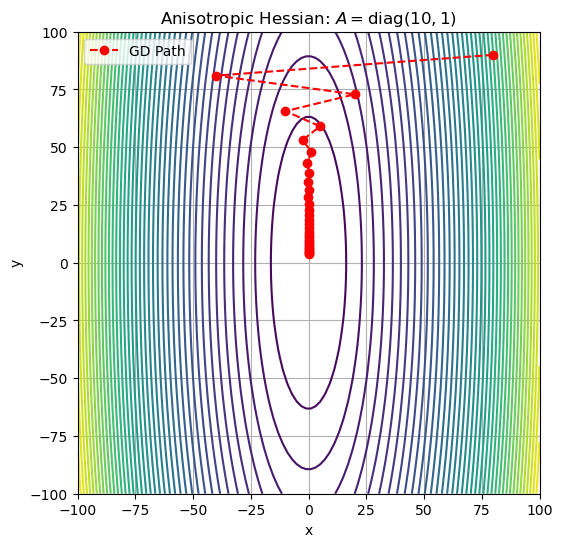
Level sets are stretched ellipses.
Gradient descent zig-zags, especially in the steep direction.
Case 3: Skewed Hessian (Off-Diagonal Elements)#
Show code cell source
A_skew = np.array([[10, 6], [6, 8]])
plot_descent(A_skew, "Skewed Hessian", lr=0.1)
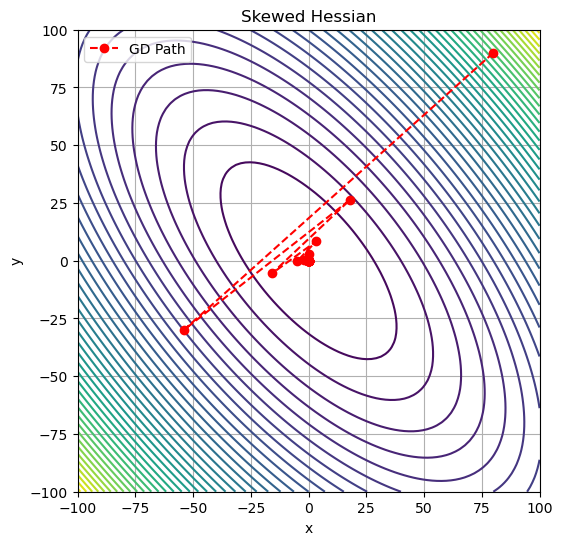
\(A = \begin{bmatrix} 10 & 6 \\ 6 & 8 \end{bmatrix}\)
Level sets are rotated ellipses.
Gradient descent strongly zig-zags and converges slowly.
The skew comes directly from the off-diagonal elements in the Hessian.
Off-diagonal terms in the Hessian rotate the level curves. Since gradient descent moves perpendicular to level curves, it zig-zags when these are skewed. This is one of the motivations for using second-order methods that take the Hessian into account.